
Mohak Bhardwaj
email: mohakb[at]cs.washington.edu


I am a Ph.D. Candidate at the Paul G. Allen School of Computer Science and Engineering at the University of Washington, advised by Byron Boots. My research focuses on developing practical algorithms and systems that enable robots to operate in dynamic real-world environments with minimal human supervision. Specific topics include integrating model-predictive control with reinforcement learning, learning-based methods for accelerated motion planning, and offline reinforcement learning.
Before transferring to University of Washington, I spent a year as a Ph.D. Robotics student at Georgia Institute of Technology, prior to which I was a Robotics Engineer at Near Earth Autonomy, Inc. In 2017, I worked as a researcher at The Air Lab at The Robotics Institute, Carnegie Mellon University. advised by Sanjiban Choudhury and Sebastian Scherer. I received my Master's in Robotic Systems Development from RI in 2016, and my B.Tech in Mechanical Engineering from Indian Institute of Technology, Varanasi.
During the course of my Ph.D, I have had the amazing opportunities to intern and collaborate with various industry research labs. In summer 2022, I was a Research Scientist Intern at Google DeepMind, London in the Controls Team lead by Martin Reidmiller. Prior to that I spent Fall 2020 and Summer 2019 as an intern at NVIDIA Seattle Robotics Lab working with Dieter Fox, Fabio Ramos and Byron Boots.
When not busy with research, you'll catch me doing stand-up and improv comedy or practicing Capoeira.
Research
Pre-prints
-
Adversarial Model for Offline Reinforcement Learning, M. Bhardwaj*, T. Xie*, B. Boots, N. Jiang, C. Cheng [Paper]
Journal Publications
Conference Publications
-
-
-
-
-
-
-
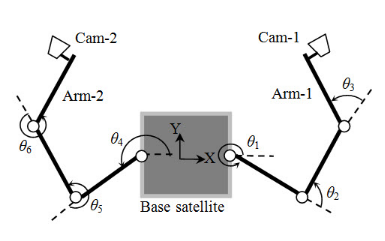
Real-time dynamic singularity avoidance while visual servoing of a dual-arm space robot
P. Mithun, V.V. Anurag, M. Bhardwaj, S.V. Shah
Advances in Robotics (AIR), 2015
[Paper]